
什么是安川機器人的彩色空間
顏色是通過眼、腦和我們的生活經驗所產生的一種對光的視覺效應。我們肉眼所能見到的光線,是由波長范圍很窄的電磁波產生;顏色就是人對光的一種感覺,由大腦產生的一種感覺。例如:綠葉反射波長為500~570nm的綠光。
例如初中物理中所學的光的三原色由紅、綠、藍組成,這就是RGB顏色空間,除此之外還有HSV、CMY顏色空間。
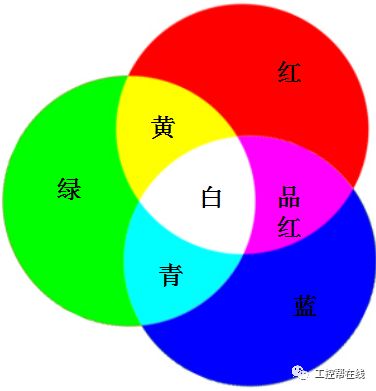
RGB模型
RGB三原色組成了五彩繽紛的*,通過不同顏色之間的比例搭配得到赤橙黃綠青藍紫,我們的相機、電視機就是利用顏色空間的模型,因此RGB主要面向硬件模型。色彩強度用0~255表示,總共256的灰度值,*大可呈現的色彩種類為256*256*256=16777216種。
CMY顏色空間它也是一種面向硬件設備(彩色打印機,復印機)的顏色模型,CMY代表青色,深紅色和黃色(顏料原色)的組合。這三種顏色是RGB的二次色,用的是另一種方式定義。在機器視覺中涉及不到,這兒不做深入分析。
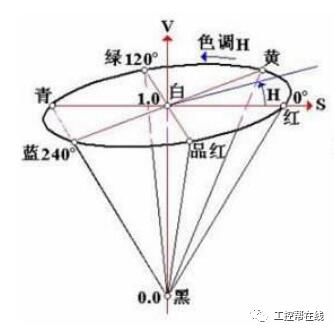
HSV顏色空間是根據顏色的直觀特性,由A. R. Smith在1978年創建的一種顏色空間, 也稱六角錐體模型(Hexcone Model)。這個顏色模型十分重要,該模型十分接近人對顏色的感知。
H(色調):用角度度量,取值范圍為0°~360°,從紅色開始按逆時針方向計算。紅色為0°,綠色為120°,藍色為240°。它們的補色是:黃色為60°,青色為180°,品紅為300°。
S(飽和度):取值范圍為0~255。
V(亮度):取值范圍為0 (黑色)~255(白色)。
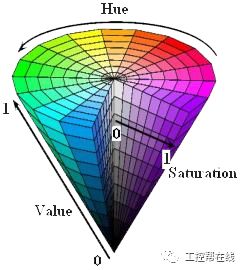
HSV模型
2. 怎么利用彩色空間
(1) 輸入圖像彩色圖像
(2) 將彩色圖像轉化成所需的空間(按R分量法、*大值法、插值法等)
(3) 在所需的空間進行圖像處理
3. 顏色識別案例
要求:識別下圖導線的顏色信息

顏色識別的過程如下圖所示
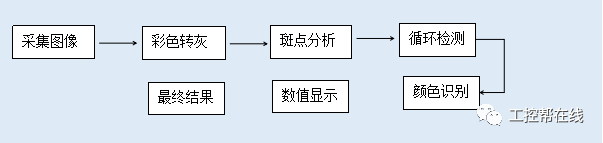
(1) 采集圖像。選擇采集路徑為文件,圖像的格式為BMP或JPG。如下圖1所示
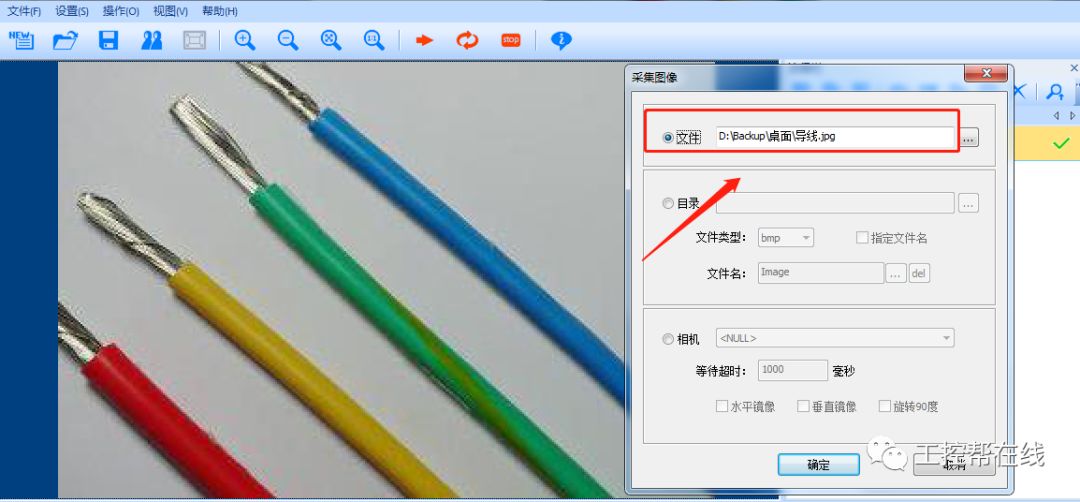
圖1
(2) 彩色轉灰。選擇需要轉出的顏色通道,可以根據需要選擇紅、綠、藍、平均值、*小值、*大值。如圖2所示。
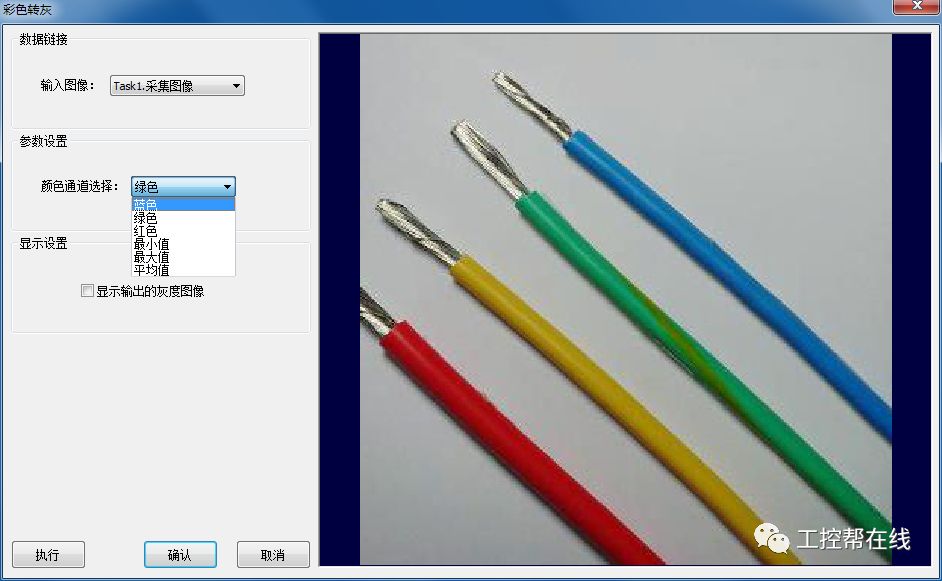
圖2
(3) 斑點分析。選擇彩色轉灰后的圖像,檢測導線的斑點數量,通過面積進行篩選,*終篩選出4個斑點。如圖3所示。
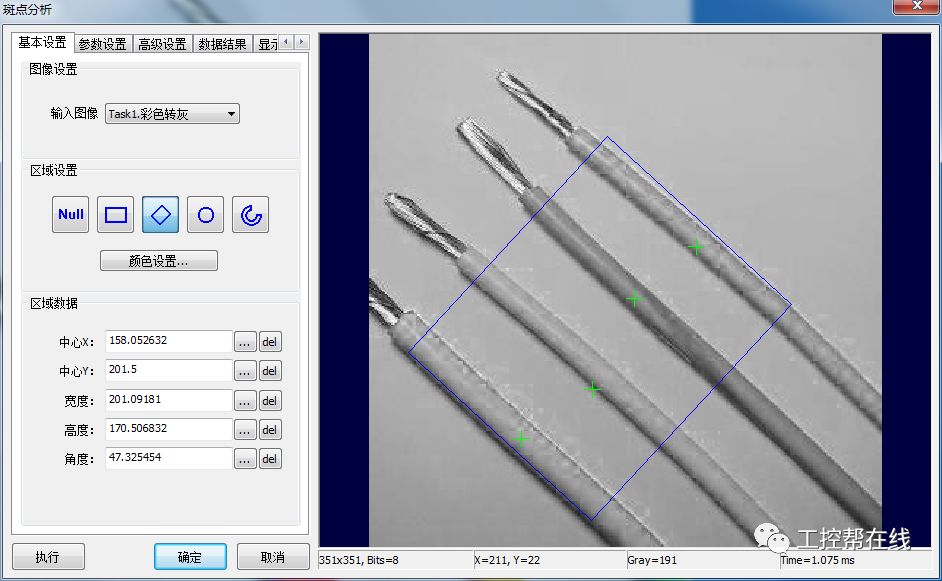
圖3
(4) 循環檢測。由于需要同時檢測4根導線顏色信息,選擇循環工具,循環的開始值為0,結束值為斑點分析得到的數量。如圖4所示。
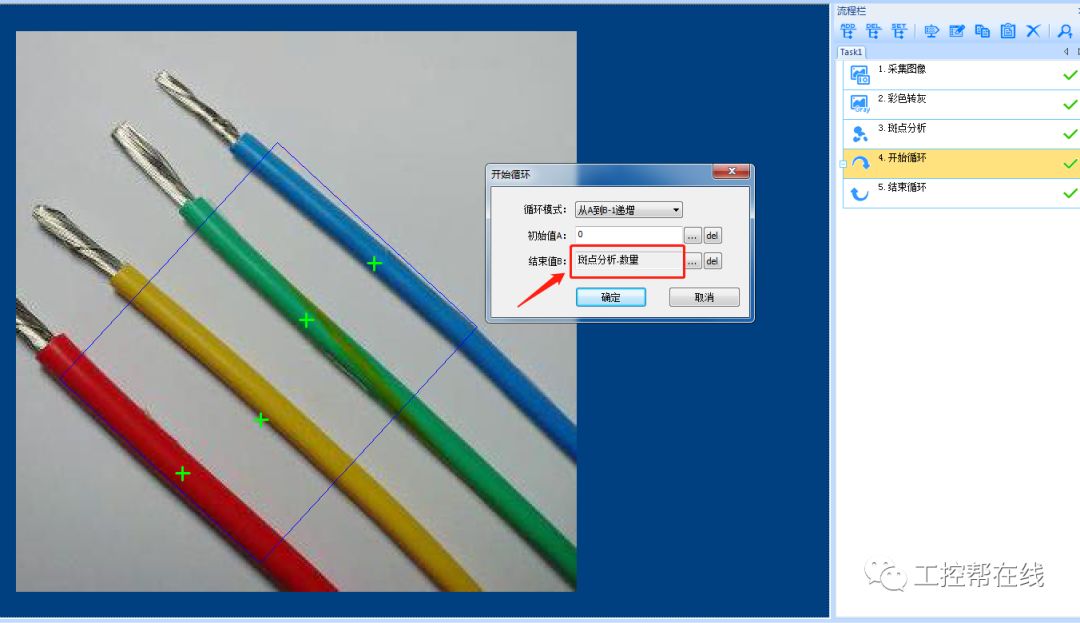
圖4
(5) 顏色識別。由于我們的目標是識別導線顏色,添加顏色識別工具至開始循環與結束循環之間;并且逐一訓練顏色樣本信息;如圖5所示。此時由于顏色識別需要進行位置信息的跟隨變化,所以位置X/Y選擇斑點分析的重心X/Y;并且勾上循環。如圖6所示。
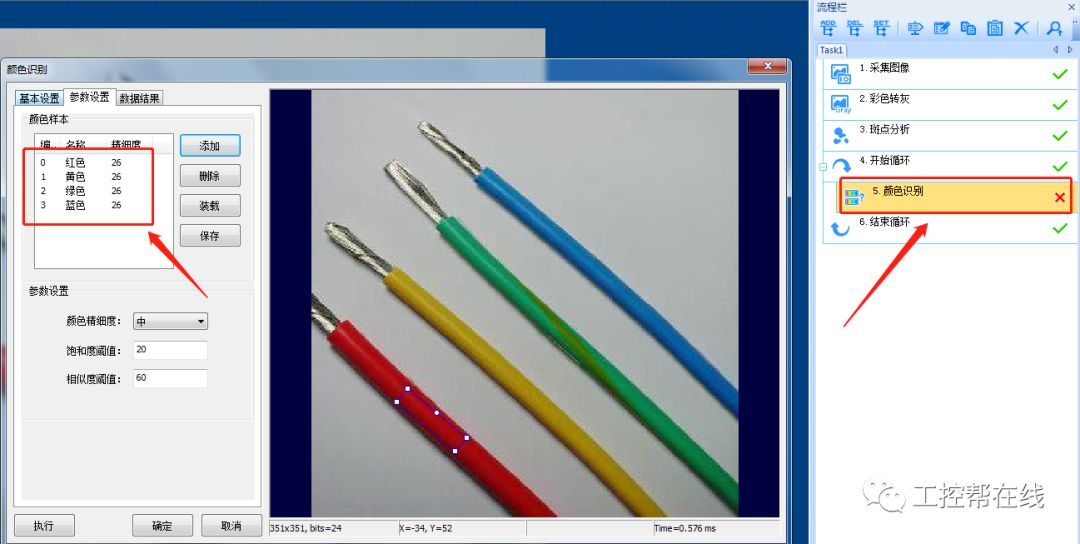
圖5
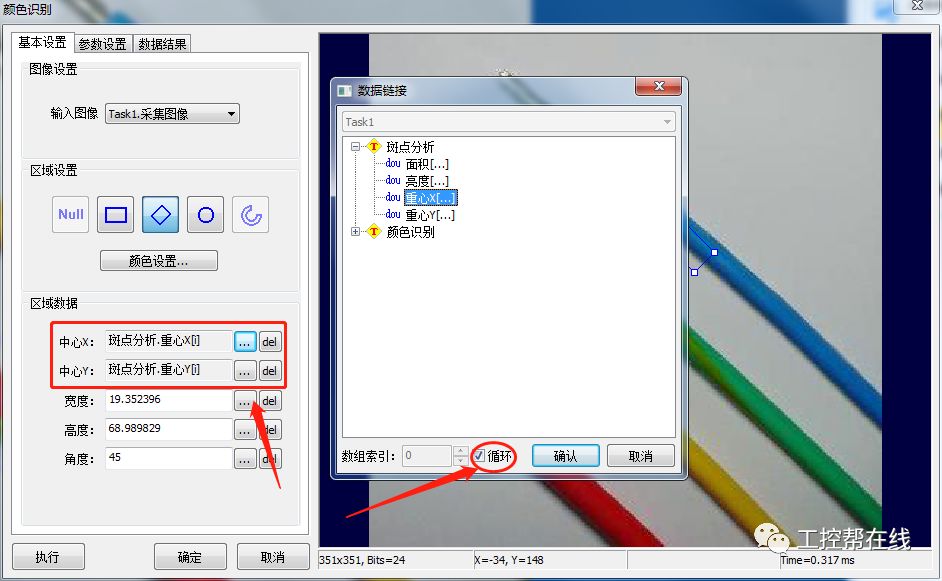
圖6
(6) 數值顯示。為了方便觀察當前檢測的顏色信息內容,添加數值顯示工具至開始循環與結束循環之間;數據鏈接選擇顏色識別的樣本,位置X/Y選擇斑點分析的重心X/Y,勾選循環。如圖7所示。
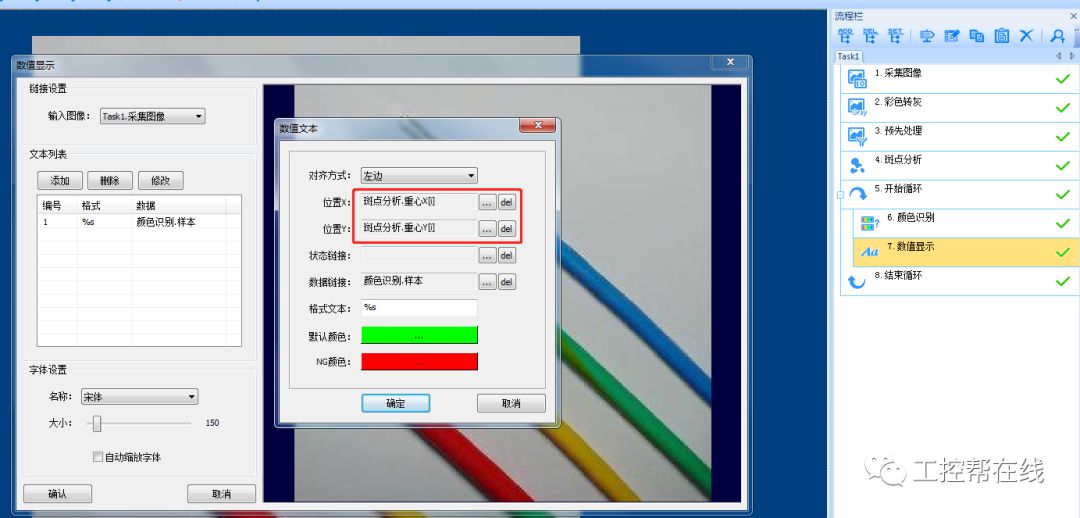
圖7
(7) 安川機器人運行結果。如圖8所示。
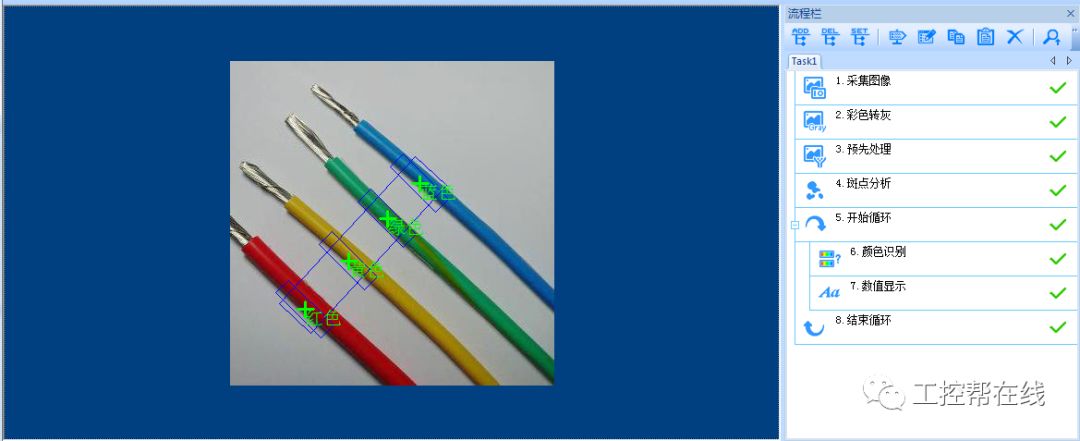
圖8
在顏色識別過程需要注意的幾點:
1. 多個顏色同時識別需要循環工具。
2. 每一種顏色的位置信息不固定需要位置信息跟隨。
3. 由于機器視覺檢測系統的顏色庫里沒有我們需要的顏色,此時需要訓練顏色樣本至顏色庫。
4. 數值顯示需要同時顯示4種顏色信息,其位置需要跟隨斑點位置變化(勾選循環,確保位置跟隨變化),且處于循環工具之間。

服務熱線



